 L’ACoLab vous propose de continuer l’atelier d’initiation à la robotique commencé au mois de Janvier.
L’ACoLab vous propose de continuer l’atelier d’initiation à la robotique commencé au mois de Janvier.
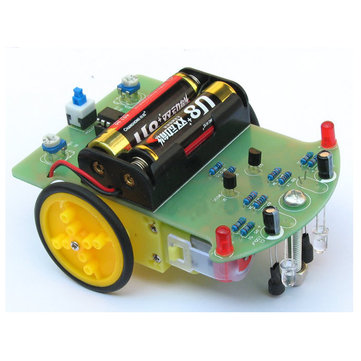
Programme : Montage de la carte Arduino Nano
- comment se présente l’Arduino-nano, à quoi sert-il ?
- comment le raccorder à notre carte électronique ?
- que pouvons-nous lui demander ?
- comment analyser le fonctionnement désiré ?
- comment traduire notre langage dans un langage compris par un µContrôleur
- comment le programmer.
À noter qu’il reste un kit pour une 4e équipe….
Les robots resteront la propriété de l’ACoLab et seront utiliser dans de futur atelier pour accroître leur capacité (gestion des croisements, prévention des collisions,…).
L’atelier se déroulera le Samedi 8 Avril de 14h à 19h à l’ACoLab.
Une participation de 10€ sera demandée au non membre même aux personnes ayant participé à l’épisode 1 de Janvier. Le nombre de place est limitée à 8 (nous n’avons que 4 robots), inscription dans les commentaires.
Il n’est pas nécessaire d’avoir fait le premier atelier pour participer à celui-ci.
Inscription au 05/04 :
- Arnaud
- Florent
- Fabienne +1
- Yann
- Cecile
- Yanninck + 2
 Follow
Follow
Bonjour,
Je m’inscris pour la nouvelle session.
Bonjour,
Je souhaite participer à l’atelier Initiation Robotique de samedi prochain.
A plus,
Yann (adhérent APIMA)
Bonjour,
Je m’inscris également, si c’est toujours possible !
Merci !
Bonjour,
On revient en force ce samedi. De nouveau 3 !
À samedi !
Bonjour,
Je voudrais m’inscrire a cette session d’initiation SVP.
Comme il n’ya a pas de section inscription?
Merci d’avance
Nishanth
Bonjour,
Malheureusement comme indiqué dans le titre de l’article, la séance est pleine. Il y a déjà 8 personnes d’inscrite pour 9 places on ne peut vraiment pas prendre des personnes supplémentaire du fait du matériel disponible (robot, fer à souder, …)
Nous regarderons pour en organiser une autre.
Cordialement,
Thomas
Bonjour, Je m’attendais à recevoir un mail bien plus tôt. donc je viens de lire votre réponse ici. J’ai interprété que c’est complet par rapport àu sujet genre episode1 +la suite lol.
En tout cas c’est vraiment dommage car je ne pense pas que je pourrais être présent à Clermont-Ferrand pour une prochaine atelier.
N’hésitez pas à me répondre si jamais il y a désistement car j’habite acoté.
Répondez ici ou envoyer un mail.
Merci d’avance.
Nishanth
Petit CR de l’après midi de ce samedi :
La dernière bestiole a trouvé sa famille d’adoption… et le montage a été réalisé de main de maître par notre trio débutant, en fait pas si débutant que ça 😉 . En quelques minutes, le circuit imprimé était équipé des composants nécessaires à la version Arduino….
L’objectif était de greffer un µ-controleur à notre bestiole en guise de cerveau.
Avant cela, sur les versions réalisées il a fallu enlever ce qui était inutile pour la suite de l’opération : Ampli OP, transistors, modification de l’ alimentation, et certaines résistances d’ailleurs récupérées pour l’adaptation à la tension d’alimentation de 7V fournie pour l’Arduino.
Tous les montages ont résisté à la mise à feu ….. Pas de fumée, pas d’odeur suspecte à la première mise sous tension, Ce fut parfait coté réalisation. Un grand Bravo à tous :clap:
Ensuite transfert du programme qui devait permettre le test et la mise au point des capteurs et des moteurs; Cette dernière un peu plus capricieuse du fait de la différence de modèle des cartes de pilotage moteurs par rapport à la version utilisée pour le prototype.
Avant la prochaine séance, je testerai les cartes moteurs et les raccorderai sur tous les robots pour pouvoir démarrer avec des configurations prêtes à être mises au point.
Prochain objectif :
réglage des 2 capteurs de luminosité, test et réglage de la motricité dans un premier temps.
Adjonction du capteur de distance et paramétrage de celui-ci
Étude du programme et modification ….. à souhait 😉